Common infrastructure¶
Raised when some data on the mesh or the discretization is not available.
This error should not be raised when the specific data simply fails to be computed for other reasons.
- exception meshmode.InconsistentMeshError[source]¶
Raised when the mesh is inconsistent in some fashion.
Prefer the more specific exceptions, e.g.
InconsistentVerticesErrorwhen possible.
- exception meshmode.InconsistentArrayDTypeError[source]¶
Raised when a mesh (or group) array does not match the provided
dtype.
- exception meshmode.InconsistentVerticesError[source]¶
Raised when an element’s local-to-global mapping does not map the unit vertices to the corresponding values in the mesh’s vertices array.
- exception meshmode.InconsistentAdjacencyError[source]¶
Raised when the nodal or the facial adjacency is inconsistent.
- meshmode.mesh.tools.find_point_to_point_mapping(src_points: ndarray, tgt_points: ndarray, *, tol: float | None = None, tol_multiplier: float | None = None, _max_leaf_points: int | None = None) ndarray[source]¶
Compute a mapping from indices of points in src_points to the matching indices of points in tgt_points.
- Parameters:
src_points – shaped
(dim, npoints)or just(dim,)if a single pointtgt_points – shaped
(dim, npoints)tol – the maximum distance allowed between matching points.
tol_multiplier – another way of specifying tolerance: as a multiplier of machine epsilon. Must not specify both tol and tol_multiplier.
- Returns:
an array storing an index into tgt_points for each point in src_points if a match exists or
-1if not.
- class meshmode.AffineMap(matrix: ArrayLike | None = None, offset: ArrayLike | None = None)[source]¶
An affine map
A@x+brepresented by a matrix A and an offset vector b.- matrix¶
A
numpy.ndarrayrepresenting the matrix A, or None.
- offset¶
A
numpy.ndarrayrepresenting the vector b, or None.
- __init__(matrix: ArrayLike | None = None, offset: ArrayLike | None = None)[source]¶
- Parameters:
matrix – A
numpy.ndarray(or something convertible to one), or None.offset – A
numpy.ndarray(or something convertible to one), or None.
Mesh management¶
Design of the Data Structure¶
Why does a Mesh need to be broken into MeshElementGroup instances?¶
Elements can be of different types (e.g. triangle, quadrilateral, tetrahedron, what have you). In addition, elements may vary in the polynomial degree used to represent them (see also below).
All these bits of information could in principle be stored by element, but having large, internally homogeneous groups is a good thing from an efficiency standpoint. (So that you can, e.g., launch one GPU kernel to deal with all order-3 triangles, instead of maybe having to dispatch based on type and size inside the kernel)
What is the difference between ‘vertices’ and ‘nodes’?¶
Nodes exist mainly to represent the (potentially non-affine) deformation of
each element, by a one-to-one correspondence with
MeshElementGroup.unit_nodes. They are unique to each element. Vertices
on the other hand exist to clarify whether or not a point shared by two
elements is actually identical (or just happens to be “close”). This is done by
assigning (single, globally shared) vertex numbers and having elements refer to
them.
Consider the following picture:
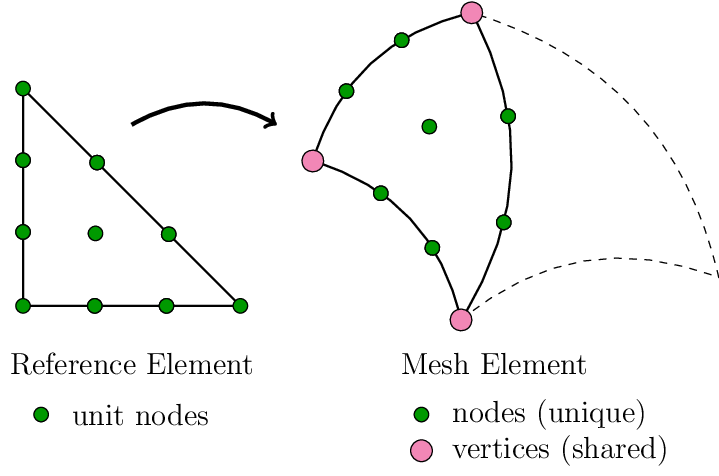
Mesh nodes and vertices
Mesh Data Structure¶
- class meshmode.mesh.MeshElementGroup(order: int, vertex_indices: onp.Array2D[np.integer[Any]] | None, nodes: onp.Array3D[floating[Any]], unit_nodes: onp.Array2D[floating[Any]])[source]¶
A group of elements sharing a common reference element.
- order: int¶
“The maximum degree used for interpolation. The exact meaning depends on the element type, e.g. for
SimplexElementGroupthis is the total degree.
- vertex_indices: onp.Array2D[np.integer[Any]] | None¶
An array of shape
(nelements, nvertices)of (mesh-wide) vertex indices. This can also be None to support the case where the associated mesh does not have anyvertices.
- nodes: onp.Array3D[floating[Any]]¶
An array of node coordinates with shape
(mesh.ambient_dim, nelements, nunit_nodes).
- unit_nodes: onp.Array2D[floating[Any]]¶
An array with shape
(dim, nunit_nodes)of nodes on the reference element. The coordinatesnodesare a mapped version of these reference nodes.
- property dim: int¶
The number of dimensions spanned by the element. Not the ambient dimension, see
Mesh.ambient_dimfor that.
- property is_affine: bool¶
A
boolflag that is True if the local-to-global parametrization of all the elements in the group is affine.
Element groups can also be compared for equality using the following methods. Note that these are very expensive, as they compare all the
nodes.- __init__(order: int, vertex_indices: onp.Array2D[np.integer[Any]] | None, nodes: onp.Array3D[floating[Any]], unit_nodes: onp.Array2D[floating[Any]]) None¶
The following abstract methods must be implemented by subclasses.
- abstractmethod classmethod make_group(*args: Any, **kwargs: Any) MeshElementGroup[source]¶
Instantiate a new group of class cls.
Unlike the constructor, this factory function performs additional consistency checks and should be used instead.
- class meshmode.mesh.ModepyElementGroup(order: int, vertex_indices: onp.Array2D[np.integer[Any]] | None, nodes: onp.Array3D[floating[Any]], unit_nodes: onp.Array2D[floating[Any]], shape: Shape, space: FunctionSpace)[source]¶
- shape_cls: ClassVar[type[Shape]]¶
Must be set by subclasses to generate the correct shape and spaces attributes for the group.
- space: FunctionSpace¶
- class meshmode.mesh.SimplexElementGroup(order: int, vertex_indices: onp.Array2D[np.integer[Any]] | None, nodes: onp.Array3D[floating[Any]], unit_nodes: onp.Array2D[floating[Any]], shape: Shape, space: FunctionSpace)[source]¶
Inherits from
MeshElementGroup.
- class meshmode.mesh.TensorProductElementGroup(order: int, vertex_indices: onp.Array2D[np.integer[Any]] | None, nodes: onp.Array3D[floating[Any]], unit_nodes: onp.Array2D[floating[Any]], shape: Shape, space: FunctionSpace)[source]¶
Inherits from
MeshElementGroup.
- class meshmode.mesh.Mesh(vertices: onp.Array2D[floating] | None, groups: Iterable[MeshElementGroup], is_conforming: bool | None = None, vertex_id_dtype: DTypeLike = dtype('int32'), element_id_dtype: DTypeLike = dtype('int32'), face_id_dtype: DTypeLike = dtype('int8'), nodal_adjacency: NodalAdjacencyLike | None = None, facial_adjacency_groups: FacialAdjacencyLike | None = None, _nodal_adjacency: NodalAdjacencyLike | None = None, _facial_adjacency_groups: FacialAdjacencyLike | None = None, skip_tests: bool = False, node_vertex_consistency_tolerance: float | None = None, skip_element_orientation_test: bool = False, factory_constructed: bool = False)[source]¶
-
- property base_element_nrs: onp.Array1D[np.integer[Any]]¶
An array of size
(len(groups),)of starting element indices for each group in the mesh.
- property base_node_nrs: onp.Array1D[np.integer[Any]]¶
An array of size
(len(groups),)of starting node indices for each group in the mesh.
- groups: tuple[MeshElementGroup, ...]¶
A tuple of
MeshElementGroupinstances.
- vertices: onp.Array2D[floating[Any]] | None¶
None or an array of vertex coordinates with shape (ambient_dim, nvertices). If None, vertices are not known for this mesh and no adjacency information can be constructed.
- is_conforming: bool | None¶
True if it is known that all element interfaces are conforming. False if it is known that some element interfaces are non-conforming. None if neither of the two is known.
- vertex_id_dtype: np.dtype[np.integer[Any]]¶
The
dtypeused to index into the vertex array.
- element_id_dtype: np.dtype[np.integer[Any]]¶
The
dtypeused to index into the element array (relative to each group).
- face_id_dtype: np.dtype[np.integer[Any]]¶
The
dtypeused to index element faces (relative to each element).
- property nodal_adjacency: NodalAdjacency¶
Nodal adjacency of the mesh, if available.
This property gets the
Mesh._nodal_adjacencyof the mesh. If the attribute value is None, the adjacency is computed and cached.- Raises:
DataUnavailableError – if the nodal adjacency cannot be obtained.
- property facial_adjacency_groups: Sequence[Sequence[FacialAdjacencyGroup]]¶
Facial adjacency of the mesh, if available.
This function gets the
Mesh._facial_adjacency_groupsof the mesh. If the attribute value is None, the adjacency is computed and cached.Each
facial_adjacency_groups[igrp]gives the facial adjacency relations for group igrp, expressed as a list ofFacialAdjacencyGroupinstances.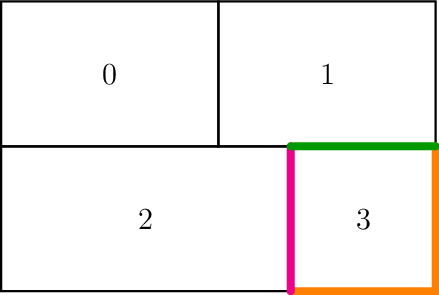
Facial Adjacency Group
For example for the mesh in the figure, the following data structure could be present:
[ [...], # connectivity for group 0 [...], # connectivity for group 1 [...], # connectivity for group 2 # connectivity for group 3 [ # towards group 1, green InteriorAdjacencyGroup(ineighbor_group=1, ...), # towards group 2, pink InteriorAdjacencyGroup(ineighbor_group=2, ...), # towards the boundary, orange BoundaryAdjacencyGroup(...) ] ]
Note that element groups are not necessarily geometrically contiguous like the figure may suggest.
- Raises:
DataUnavailableError – if the facial adjacency cannot be obtained.
- _nodal_adjacency: Literal[False] | NodalAdjacency | None¶
A description of the nodal adjacency of the mesh. This can be False if no adjacency is known or should be computed, None to compute the adjacency on demand or a given
NodalAdjacencyinstance.This attribute caches the values of
nodal_adjacency.
- _facial_adjacency_groups: Literal[False] | tuple[tuple[FacialAdjacencyGroup, ...], ...] | None¶
A description of the facial adjacency of the mesh. This can be False if no adjacency is known or should be computed, None to compute the adjacency on demand or a list of
FacialAdjacencyGroupinstances.This attribute caches the values of
facial_adjacency_groups.
- copy(*, skip_tests: bool = False, node_vertex_consistency_tolerance: Literal[False] | bool | None = None, skip_element_orientation_test: bool = False, factory_constructed: bool = True, **kwargs: Any) Mesh[source]¶
- __eq__(other: object) bool[source]¶
Compare two meshes for equality.
Warning
This operation is very expensive, as it compares all the vertices and groups between the two meshes. If available, the nodal and facial adjacency information is compared as well.
Warning
Only the (uncached)
_nodal_adjacencyand_facial_adjacency_groupsare compared. This can fail for two meshes if one callednodal_adjacency()and the other one did not, even if they would be equal.
- meshmode.mesh.make_mesh(vertices: onp.Array2D[floating[Any]] | None, groups: Iterable[MeshElementGroup], *, nodal_adjacency: Literal[False] | Iterable[onp.Array1D[np.integer[Any]]] | NodalAdjacency | None = None, facial_adjacency_groups: Literal[False] | Sequence[Sequence[FacialAdjacencyGroup]] | None = None, is_conforming: bool | None = None, vertex_id_dtype: DTypeLike = dtype('int32'), element_id_dtype: DTypeLike = dtype('int32'), face_id_dtype: DTypeLike = dtype('int8'), skip_tests: bool = False, node_vertex_consistency_tolerance: float | None = None, skip_element_orientation_test: bool = False, force_positive_orientation: bool = False) Mesh[source]¶
Construct a new mesh from a given list of groups.
This constructor performs additional checks on the mesh once constructed and should be preferred to calling the constructor of the
Meshclass directly.- Parameters:
vertices – an array of vertices that match the given element groups. These can be None for meshes where adjacency is not required (e.g. non-conforming meshes).
nodal_adjacency –
a definition of the nodal adjacency of the mesh. This argument can take one of four values:
False, in which case the information is marked as unavailable for this mesh and will not be computed at all. This should be used if the vertex adjacency does not convey the full picture, e.g if there are hanging nodes in the geometry.
None, in which case the nodal adjacency will be deduced from the vertex adjacency on demand (this requires the vertices).
a tuple of
(element_neighbors_starts, element_neighbors)from which aNodalAdjacencyobject can be constructed.a
NodalAdjacencyobject.
facial_adjacency_groups –
a definition of the facial adjacency for each group in the mesh. This argument can take one of three values:
False, in which case the information is marked as unavailable for this mesh and will not be computed.
None, in which case the facial adjacency will be deduced from the vertex adjacency on demand (this requires vertices).
an iterable of
FacialAdjacencyGroupobjects.
is_conforming – True if the mesh is known to be conforming.
vertex_id_dtype – an integer
dtypefor the vertex indices.element_id_dtype – an integer
dtypefor the element indices (relative to an element group).face_id_dtype – an integer
dtypefor the face indices (relative to an element).skip_tests – a flag used to skip any mesh consistency checks. This can be set to True in special situation, e.g. when loading a broken mesh that will be fixed later.
node_vertex_consistency_tolerance – see
check_mesh_consistency().skip_element_orientation_test – see
check_mesh_consistency().
- meshmode.mesh.check_mesh_consistency(mesh: Mesh, *, node_vertex_consistency_tolerance: Literal[False] | float | None = None, skip_element_orientation_test: bool = False) None[source]¶
Check the mesh for consistency between the vertices, nodes, and their adjacency.
This function checks:
The node to vertex consistency, by interpolation.
The nodal adjacency shapes and dtypes.
The facial adjacency shapes and dtypes.
The mesh orientation using
find_volume_mesh_element_orientations().
- Parameters:
node_vertex_consistency_tolerance – If False, do not check for consistency between vertex and nodal data. If None, a default tolerance based on the
dtypeof the vertices array will be used. Otherwise, the given value is used as the tolerance.skip_element_orientation_test – If False, check that element orientation is positive in volume meshes (i.e. ones where ambient and topological dimension match).
- Raises:
InconsistentMeshError – when the mesh is found to be inconsistent in some fashion.
- meshmode.mesh.is_mesh_consistent(mesh: Mesh, *, node_vertex_consistency_tolerance: Literal[False] | float | None = None, skip_element_orientation_test: bool = False) bool[source]¶
A boolean version of
check_mesh_consistency().
- class meshmode.mesh.NodalAdjacency(neighbors_starts: onp.Array1D[np.integer[Any]], neighbors: onp.Array1D[np.integer[Any]])[source]¶
Describes nodal element adjacency information, i.e. information about elements that touch in at least one point.
- neighbors_starts: onp.Array1D[np.integer[Any]]¶
”
element_id_t [nelements+1]Use together with
neighbors.neighbors_starts[iel]andneighbors_starts[iel+1]together indicate a ranges of element indicesneighborswhich are adjacent to iel.
- neighbors: onp.Array1D[np.integer[Any]]¶
element_id_t []See
neighbors_starts.
- class meshmode.mesh.FacialAdjacencyGroup(igroup: int, elements: onp.Array1D[np.integer[Any]], element_faces: onp.Array1D[np.integer[Any]])[source]¶
Describes facial element adjacency information for one
MeshElementGroup, i.e. information about elements that share (part of) a face or elements that lie on a boundary.Facial Adjacency Group
Represents (for example) one of the (colored) interfaces between
MeshElementGroupinstances, or an interface betweenMeshElementGroupand a boundary. (Note that element groups are not necessarily contiguous like the figure may suggest.)- elements: onp.Array1D[np.integer[Any]]¶
- element_faces: onp.Array1D[np.integer[Any]]¶
- class meshmode.mesh.InteriorAdjacencyGroup(igroup: int, elements: onp.Array1D[np.integer[Any]], element_faces: onp.Array1D[np.integer[Any]], ineighbor_group: int, neighbors: onp.Array1D[np.integer[Any]], neighbor_faces: onp.Array1D[np.integer[Any]], aff_map: AffineMap)[source]¶
Describes interior facial element adjacency information for one
MeshElementGroup.- ineighbor_group: int¶
ID of neighboring group, or None for boundary faces. If identical to
igroup, then this contains the self-connectivity in this group.
- elements: onp.Array1D[np.integer[Any]]¶
element_id_t [nfagrp_elements].elements[i]gives the element number withinigroupof the interior face.
- element_faces: onp.Array1D[np.integer[Any]]¶
face_id_t [nfagrp_elements].element_faces[i]gives the face index of the interior face in elementelements[i].
- neighbors: onp.Array1D[np.integer[Any]]¶
element_id_t [nfagrp_elements].neighbors[i]gives the element number withinineighbor_groupof the element oppositeelements[i].
- neighbor_faces: onp.Array1D[np.integer[Any]]¶
face_id_t [nfagrp_elements].neighbor_faces[i]gives the face index of the opposite face in elementneighbors[i]
- class meshmode.mesh.BoundaryAdjacencyGroup(igroup: int, elements: onp.Array1D[np.integer[Any]], element_faces: onp.Array1D[np.integer[Any]], boundary_tag: BoundaryTag)[source]¶
Describes boundary adjacency information for one
MeshElementGroup.- boundary_tag: BoundaryTag¶
“The boundary tag identifier of this group.
- elements: onp.Array1D[np.integer[Any]]¶
”
element_id_t [nfagrp_elements].elements[i]gives the element number withinigroupof the boundary face.
- element_faces: onp.Array1D[np.integer[Any]]¶
”
face_id_t [nfagrp_elements].element_faces[i]gives the face index of the boundary face in elementelements[i].
- class meshmode.mesh.InterPartAdjacencyGroup(igroup: int, elements: onp.Array1D[np.integer[Any]], element_faces: onp.Array1D[np.integer[Any]], boundary_tag: BoundaryTag, part_id: PartID, neighbors: onp.Array1D[np.integer[Any]], neighbor_faces: onp.Array1D[np.integer[Any]], aff_map: AffineMap)[source]¶
Describes inter-part adjacency information for one
MeshElementGroup.- boundary_tag: BoundaryTag¶
The boundary tag identifier of this group. Will be an instance of
BTAG_PARTITION.
- elements: onp.Array1D[np.integer[Any]]¶
Group-local element numbers. Element
element_id_dtype elements[i]and faceface_id_dtype element_faces[i]is connected to neighbor elementelement_id_dtype neighbors[i]with faceface_id_dtype neighbor_faces[i].
- element_faces: onp.Array1D[np.integer[Any]]¶
face_id_dtype element_faces[i]gives the face ofelement_id_dtype elements[i]that is connected toneighbors[i].
- neighbors: onp.Array1D[np.integer[Any]]¶
element_id_dtype neighbors[i]gives the volume element number within the neighboring part of the element connected toelement_id_dtype elements[i](which is a boundary element index). Use ~meshmode.mesh.processing.find_group_indices to find the group that the element belongs to, then subtractelement_nr_baseto find the element of the group.
- neighbor_faces: onp.Array1D[np.integer[Any]]¶
face_id_dtype global_neighbor_faces[i]gives face index within the neighboring part of the face connected toelement_id_dtype elements[i]
- aff_map: AffineMap¶
An
AffineMaprepresenting the mapping from the group’s faces to their corresponding neighbor faces.
Added in version 2017.1.
- meshmode.mesh.as_python(mesh: Mesh, function_name: str = 'make_mesh') str[source]¶
- Returns:
a snippet of Python code (as a string) that will recreate the mesh given as an input parameter.
- meshmode.mesh.check_bc_coverage(mesh: Mesh, boundary_tags: Collection[Hashable], incomplete_ok: bool = False, true_boundary_only: bool = True) None[source]¶
Verify boundary condition coverage.
Given a list of boundary tags as boundary_tags, this function verifies that
1. the union of all these boundaries gives the complete boundary, 1. all these boundaries are disjoint.
- Parameters:
incomplete_ok – Do not report an error if some faces are not covered by the boundary conditions.
true_boundary_only – only verify for faces whose tags do not inherit from BTAG_NO_BOUNDARY.
Mesh generation¶
Curves¶
- meshmode.mesh.generation.make_curve_mesh(curve_f: Callable[[NDArray[floating]], NDArray[floating]], element_boundaries: NDArray[floating], order: int, *, unit_nodes: NDArray[floating] | None = None, node_vertex_consistency_tolerance: float | bool | None = None, closed: bool = True, return_parametrization_points: Literal[False] = False) Mesh[source]¶
- meshmode.mesh.generation.make_curve_mesh(curve_f: Callable[[NDArray[floating]], NDArray[floating]], element_boundaries: NDArray[floating], order: int, *, unit_nodes: NDArray[floating] | None = None, node_vertex_consistency_tolerance: float | bool | None = None, closed: bool = True, return_parametrization_points: Literal[True]) tuple[Mesh, NDArray[floating]]
- Parameters:
curve_f – parametrization for a curve, accepting a vector of point locations and returning an array of shape
(2, npoints).element_boundaries – a vector of element boundary locations in \([0, 1]\), in order. \(0\) must be the first entry, \(1\) the last one.
order – order of the (simplex) elements. If unit_nodes is also provided, the orders should match.
unit_nodes – if given, the unit nodes to use. Must have shape
(2, nnodes).node_vertex_consistency_tolerance – passed to the
Meshconstructor. If False, no checks are performed.closed – if True, the curve is assumed closed and the first and last of the element_boundaries must match.
return_parametrization_points – if True, the parametrization points at which all the nodes in the mesh were evaluated are also returned.
- Returns:
a
Mesh, or if return_parametrization_points is True, a tuple(mesh, par_points), where par_points is an array of parametrization points.
Curve parameterizations¶
- meshmode.mesh.generation.circle(t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.ellipse(aspect_ratio: float, t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.cloverleaf(t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.drop(t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.n_gon(n_corners: int, t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.qbx_peanut(t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.dumbbell(gamma: float, beta: float, t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.wobbly_dumbbell(gamma: float, beta: float, p: int, wavenumber: int, t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.apple(a: float, t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
a – roundness parameter in \([0, 1/2]\), where \(0\) gives a circle and \(1/2\) gives a cardioid.
t – the parametrization, runs from \([0, 1]\).
- Returns:
an array of shape
(2, t.size).
- meshmode.mesh.generation.clamp_piecewise(r_major: float, r_minor: float, gap: float, t: NDArray[floating]) NDArray[floating][source]¶
- Parameters:
r_major – radius of the outer shell.
r_minor – radius of the inner shell.
gap – half-angle (in radians) of the right-hand side gap.
- Returns:
an array of shape
(2, t.size).
- class meshmode.mesh.generation.NArmedStarfish(n_arms: int, amplitude: float, phase: float = 0.0)[source]¶
Inherits from
WobblyCircle.
- meshmode.mesh.generation.starfish3¶
- meshmode.mesh.generation.starfish5¶
Surfaces¶
- meshmode.mesh.generation.generate_icosahedron(r: float, order: int, *, node_vertex_consistency_tolerance: float | bool | None = None, unit_nodes: NDArray[floating] | None = None) Mesh[source]¶
- meshmode.mesh.generation.generate_cube_surface(r: float, order: int, *, node_vertex_consistency_tolerance: float | bool | None = None, unit_nodes: NDArray[floating] | None = None) Mesh[source]¶
- meshmode.mesh.generation.generate_sphere(r: float, order: int, *, uniform_refinement_rounds: int = 0, node_vertex_consistency_tolerance: float | bool | None = None, unit_nodes: NDArray[floating] | None = None, group_cls: type[MeshElementGroup] | None = None) Mesh[source]¶
- Parameters:
r – radius of the sphere.
order – order of the group elements. If unit_nodes is also provided, the orders should match.
uniform_refinement_rounds – number of uniform refinement rounds to perform after the initial mesh was created.
node_vertex_consistency_tolerance – passed to the
Meshconstructor. If False, no checks are performed.unit_nodes – if given, the unit nodes to use. Must have shape
(3, nnodes).group_cls – a
MeshElementGroupsubclass. Based on the class, a different polyhedron is used to construct the sphere: simplices usegenerate_icosahedron()and tensor products use agenerate_cube_surface().
- meshmode.mesh.generation.generate_torus(r_major: float, r_minor: float, n_major: int = 20, n_minor: int = 10, *, order: int = 1, node_vertex_consistency_tolerance: float | bool | None = None, unit_nodes: NDArray[floating] | None = None, group_cls: type[MeshElementGroup] | None = None) Mesh[source]¶
Generate a torus.
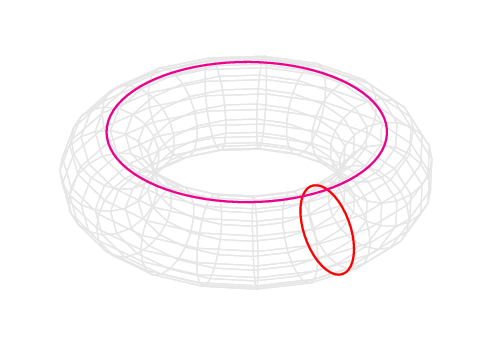
A torus with major circle (magenta) and minor circle (red).
The torus is obtained as the image of the parameter domain \((u, v) \in [0, 2\pi) \times [0, 2 \pi)\) under the map
\[\begin{split}\begin{aligned} x &= \cos(u) (r_\text{major} + r_\text{minor} \cos(v)), \\ y &= \sin(u) (r_\text{major} + r_\text{minor} \sin(v)). \\ z &= r_\text{minor} \sin(v). \end{aligned}\end{split}\]where \(r_\text{major}\) and \(r_\text{minor}\) are the radii of the major and minor circles, respectively. The parameter domain is tiled with \(n_\text{major} \times n_\text{minor}\) contiguous rectangles, and then each rectangle is subdivided into two triangles.
- Parameters:
r_major – radius of the major circle.
r_minor – radius of the minor circle.
n_major – number of rectangles along major circle.
n_minor – number of rectangles along minor circle.
order – order of the (simplex) elements. If unit_nodes is also provided, the orders should match.
node_vertex_consistency_tolerance – passed to the
Meshconstructor. If False, no checks are performed.unit_nodes – if given, the unit nodes to use. Must have shape
(3, nnodes).
- Returns:
a
Meshof a torus.
- meshmode.mesh.generation.generate_cruller(r_major: float, r_minor: float, n_major: int = 20, n_minor: int = 10, *, order: int = 1, node_vertex_consistency_tolerance: float | bool | None = None, unit_nodes: NDArray[floating] | None = None, group_cls: type[MeshElementGroup] | None = None) Mesh[source]¶
Generate a “cruller” (as the pastry) like geometry.
The “cruller” is defined by
\[\begin{split}\begin{aligned} x &= \cos(u) (r_\text{major} + r_\text{minor} H(u, v) \cos(v)), \\ y &= \sin(u) (r_\text{major} + r_\text{minor} H(u, v) \sin(v)), \\ z &= r_\text{minor} H(u, v) \sin(v), \end{aligned}\end{split}\]where \(H(u, v) = 1.0 + 0.25 \cos(5 u + 3 v)\). This geometry and parameters are taken from [Barnett2020].
[Barnett2020]A. Barnett, L. Greengard, T. Hagstrom, High-Order Discretization of a Stable Time-Domain Integral Equation for 3D Acoustic Scattering, Journal of Computational Physics, Vol. 402, pp. 109047–109047, 2020, DOI.
- meshmode.mesh.generation.refine_mesh_and_get_urchin_warper(order: int, m: int, n: int, est_rel_interp_tolerance: float, min_rad: float = 0.2, uniform_refinement_rounds: int = 0) tuple[Refiner, Callable[[Mesh], Mesh]][source]¶
- Parameters:
order – order of the (simplex) elements.
m – order of the spherical harmonic \(Y^m_n\).
n – order of the spherical harmonic \(Y^m_n\).
est_rel_interp_tolerance – a tolerance for the relative interpolation error estimates on the warped version of the mesh.
- Returns:
a tuple
(refiner, warp_mesh), where refiner is aRefinerWithoutAdjacency(from which the unwarped mesh may be obtained), and whoseget_current_mesh()returns a locally-refinedMeshof a sphere and warp_mesh is a callable taking and returning a mesh that warps the unwarped mesh into a smooth shape covered by a spherical harmonic of order \((m, n)\).
- meshmode.mesh.generation.generate_urchin(order: int, m: int, n: int, est_rel_interp_tolerance: float, min_rad: float = 0.2) Mesh[source]¶
- Parameters:
order – order of the (simplex) elements. If unit_nodes is also provided, the orders should match.
m – order of the spherical harmonic \(Y^m_n\).
n – order of the spherical harmonic \(Y^m_n\).
est_rel_interp_tolerance – a tolerance for the relative interpolation error estimates on the warped version of the mesh.
- Returns:
a refined
Meshof a smooth shape covered by a spherical harmonic of order \((m, n)\).
- meshmode.mesh.generation.generate_surface_of_revolution(get_radius: Callable[[NDArray[floating], NDArray[floating]], NDArray[floating]], height_discr: NDArray[floating], angle_discr: NDArray[floating], order: int, *, node_vertex_consistency_tolerance: float | bool | None = None, unit_nodes: NDArray[floating] | None = None) Mesh[source]¶
Return a cylinder aligned with the “height” axis aligned with the Z axis.
- Parameters:
get_radius – A callable function that takes in a 1D array of heights and a 1D array of angles and returns a 1D array of radii.
height_discr – A discretization of
[0, 2*pi).angle_discr – A discretization of
[0, 2*pi).order – order of the (simplex) elements. If unit_nodes is also provided, the orders should match.
node_vertex_consistency_tolerance – passed to the
Meshconstructor. If False, no checks are performed.unit_nodes – if given, the unit nodes to use. Must have shape
(3, nnodes).
Volumes¶
- meshmode.mesh.generation.generate_box_mesh(axis_coords: tuple[NDArray[np.floating], ...], order: int = 1, *, coord_dtype: Any = <class 'numpy.float64'>, vertex_id_dtype: Any = <class 'numpy.int32'>, element_id_dtype: Any = <class 'numpy.int32'>, face_id_dtype: Any = <class 'numpy.int8'>, periodic: tuple[bool, ...] | None = None, group_cls: type[MeshElementGroup] | None = None, boundary_tag_to_face: dict[Any, list[str]] | None = None, mesh_type: str | None = None, unit_nodes: NDArray[np.floating] | None = None) Mesh[source]¶
Create a semi-structured mesh.
- Parameters:
axis_coords – a tuple with a number of entries corresponding to the number of dimensions, with each entry a numpy array specifying the coordinates to be used along that axis. The coordinates for a given axis must define a nonnegative number of subintervals (in other words, the length can be 0 or a number greater than or equal to 2).
periodic – an optional tuple of
boolindicating whether the mesh is periodic along each axis. Acts as a shortcut for callingmeshmode.mesh.processing.glue_mesh_boundaries().group_cls – One of
meshmode.mesh.SimplexElementGroupormeshmode.mesh.TensorProductElementGroup.boundary_tag_to_face –
an optional dictionary for tagging boundaries. The keys correspond to custom boundary tags, with the values giving a list of the faces on which they should be applied in terms of coordinate directions (
+x,-x,+y,-y,+z,-z,+w,-w).For example:
boundary_tag_to_face = {"bdry_1": ["+x", "+y"], "bdry_2": ["-x"]}
mesh_type –
In two dimensions with non-tensor-product elements, mesh_type may be set to
"X"to generate this type of mesh:_______ |\ /| | \ / | | X | | / \ | |/ \| ^^^^^^^
instead of the default:
_______ |\ | | \ | | \ | | \ | | \| ^^^^^^^
Specifying a value other than None for all other mesh dimensionalities and element types is an error.
Changed in version 2017.1: group_factory parameter added.
Changed in version 2020.1: boundary_tag_to_face parameter added.
Changed in version 2020.3: group_factory deprecated and renamed to group_cls.
- meshmode.mesh.generation.generate_regular_rect_mesh(a: Sequence[float] = (0, 0), b: Sequence[float] = (1, 1), *, nelements_per_axis: tuple[int, ...] | None = None, npoints_per_axis: tuple[int, ...] | None = None, periodic: tuple[bool, ...] | None = None, order: int = 1, boundary_tag_to_face: dict[Any, list[str]] | None = None, group_cls: type[MeshElementGroup] | None = None, mesh_type: str | None = None, n: int | None = None) Mesh[source]¶
Create a semi-structured rectangular mesh with equispaced elements.
Note
Specify only one of nelements_per_axis and npoints_per_axis.
- Parameters:
a – the lower left hand point of the rectangle.
b – the upper right hand point of the rectangle.
nelements_per_axis – an optional tuple of integers indicating the number of elements along each axis.
npoints_per_axis – an optional tuple of integers indicating the number of points along each axis.
periodic – an optional tuple of
boolindicating whether the mesh is periodic along each axis. Acts as a shortcut for callingmeshmode.mesh.processing.glue_mesh_boundaries().order – the mesh element order.
boundary_tag_to_face – an optional dictionary for tagging boundaries. See
generate_box_mesh().group_cls – see
generate_box_mesh().mesh_type – see
generate_box_mesh().
- meshmode.mesh.generation.generate_warped_rect_mesh(dim: int, order: int, *, nelements_side: int | None = None, npoints_side: int | None = None, group_cls: type[MeshElementGroup] | None = None, n: int | None = None) Mesh[source]¶
Generate a mesh of a warped square/cube. Mainly useful for testing functionality with curvilinear meshes.
- meshmode.mesh.generation.generate_annular_cylinder_slice_mesh(n: int, center: NDArray[floating], inner_radius: float, outer_radius: float, *, periodic: bool = False) Mesh[source]¶
Generate a slice of a 3D annular cylinder for \(\theta \in [-\frac{\pi}{4}, \frac{\pi}{4}]\). Optionally periodic in $theta$.
Tools for Iterative Refinement¶
- meshmode.mesh.generation.warp_and_refine_until_resolved(unwarped_mesh_or_refiner: Mesh | Refiner, warp_callable: Callable[[Mesh], Mesh], est_rel_interp_tolerance: float) Mesh[source]¶
Given an original (“unwarped”)
meshmode.mesh.Meshand a warping function warp_callable that takes and returns a mesh and a tolerance to which the mesh should be resolved by the mapping polynomials, this function will iteratively refine the unwarped_mesh until relative interpolation error estimates on the warped version are smaller than est_rel_interp_tolerance on each element.- Returns:
The refined, unwarped mesh.
Added in version 2018.1.
Mesh input/output¶
- class meshmode.mesh.io.ScriptWithFilesSource(source: str, filenames: Iterable[str], source_name: str = 'temp.geo')[source]¶
Added in version 2016.1.
- source¶
The script code to be fed to gmsh.
- filenames¶
The names of files to be copied to the temporary directory where gmsh is run.
- meshmode.mesh.io.read_gmsh(filename: str, force_ambient_dim: int | None = None, *, mesh_construction_kwargs: Mapping[str, Any] | None = None, return_tag_to_elements_map: Literal[False] = False) Mesh[source]¶
- meshmode.mesh.io.read_gmsh(filename: str, force_ambient_dim: int | None = None, *, mesh_construction_kwargs: Mapping[str, Any] | None = None, return_tag_to_elements_map: Literal[True]) tuple[Mesh, dict[str, IndexArray]]
Read a gmsh mesh file from filename and return a
meshmode.mesh.Mesh.- Parameters:
force_ambient_dim – if not None, truncate point coordinates to this many dimensions.
mesh_construction_kwargs – None or a dictionary of keyword arguments passed to the
meshmode.mesh.Meshconstructor.return_tag_to_elements_map – If True, return in addition to the mesh a
dictthat maps each volume tag in the gmsh file to anumpy.ndarraycontaining meshwide indices of the elements that belong to that volume.
- meshmode.mesh.io.generate_gmsh(source: GmshSource, dimensions: int | None = None, order: int | None = None, *, other_options: Sequence[str] | None = None, extension: str = 'geo', gmsh_executable: str = 'gmsh', force_ambient_dim: int | None = None, output_file_path: str | None = None, mesh_construction_kwargs: Mapping[str, Any] | None = None, target_unit: Literal['M', 'MM'] | None = None, return_tag_to_elements_map: Literal[False] = False, output_file_name: str | None = None) Mesh[source]¶
- meshmode.mesh.io.generate_gmsh(source: GmshSource, dimensions: int | None = None, order: int | None = None, *, other_options: Sequence[str] | None = None, extension: str = 'geo', gmsh_executable: str = 'gmsh', force_ambient_dim: int | None = None, output_file_path: str | None = None, mesh_construction_kwargs: Mapping[str, Any] | None = None, target_unit: Literal['M', 'MM'] | None = None, return_tag_to_elements_map: Literal[True], output_file_name: str | None = None) tuple[Mesh, dict[str, IndexArray]]
Run gmsh on the input given by source, and return a
meshmode.mesh.Meshbased on the result.- Parameters:
source – an instance of either
gmsh_interop.reader.FileSourceorgmsh_interop.reader.ScriptSourceforce_ambient_dim – if not None, truncate point coordinates to this many dimensions.
mesh_construction_kwargs – None or a dictionary of keyword arguments passed to the
meshmode.mesh.Meshconstructor.target_unit – Value of the option Geometry.OCCTargetUnit. Supported values are the strings ‘M’ or ‘MM’.
- meshmode.mesh.io.from_meshpy(mesh_info, order: int = 1) Mesh[source]¶
Imports a mesh from a
meshpymesh_info data structure, which may be generated by eithermeshpy.triangleormeshpy.tet.
- meshmode.mesh.io.from_vertices_and_simplices(vertices: np.ndarray, simplices: np.ndarray, order: int = 1, fix_orientation: bool = False) Mesh[source]¶
Imports a mesh from a numpy array of vertices and an array of simplices.
- Parameters:
vertices – An array of vertex coordinates with shape (ambient_dim, nvertices)
simplices – An array (nelements, nvertices) of (mesh-wide) vertex indices.
- meshmode.mesh.io.to_json(mesh: Mesh) dict[str, Any][source]¶
Return a JSON-able Python data structure for mesh. The structure directly reflects the
meshmode.mesh.Meshdata structure.
References¶
- class meshmode.mesh.io.GmshSource¶
See
gmsh_interop.runner, also reexported here.
- class meshmode.mesh.io.IndexArray¶
A
numpy.ndarrayof integer dtype.
Mesh processing¶
- class meshmode.mesh.processing.BoundaryPairMapping(from_btag: Hashable, to_btag: Hashable, aff_map: AffineMap)[source]¶
Represents an affine mapping from one boundary to another.
- from_btag¶
The tag of one boundary.
- to_btag¶
The tag of the other boundary.
- aff_map¶
An
meshmode.AffineMapthat maps points on boundary from_btag into points on boundary to_btag.
- meshmode.mesh.processing.find_group_indices(groups: Sequence[MeshElementGroup], meshwide_elems: onp.Array1D[np.integer[Any]]) onp.Array1D[np.integer[Any]][source]¶
- Parameters:
groups – A list of
MeshElementGroupinstances that contain meshwide_elems.meshwide_elems – A
numpy.ndarrayof mesh-wide element numbers. Usually computed byelem + base_element_nr.
- Returns:
A
numpy.ndarrayof group numbers that meshwide_elem belongs to.
- meshmode.mesh.processing.partition_mesh(mesh: Mesh, part_id_to_elements: Mapping[PartID, onp.Array1D[np.integer[Any]]], return_parts: Sequence[PartID] | None = None) Mapping[PartID, Mesh][source]¶
- Parameters:
mesh – A
Meshto be partitioned.part_id_to_elements – A
dictmapping a part identifier to a sortednumpy.ndarrayof elements.return_parts – An optional list of parts to return. By default, returns all parts.
- Returns:
A
dictmapping part identifiers to instances ofMeshthat represent the corresponding part of mesh.
- meshmode.mesh.processing.find_volume_mesh_element_orientations(mesh: Mesh, *, tolerate_unimplemented_checks: bool = False) onp.Array1D[floating[Any]][source]¶
Return a positive floating point number for each positively oriented element, and a negative floating point number for each negatively oriented element.
- Parameters:
tolerate_unimplemented_checks – If True, elements for which no check is available will return NaN.
- meshmode.mesh.processing.flip_element_group(vertices: onp.Array2D[floating[Any]], grp: MeshElementGroup, grp_flip_flags: onp.Array1D[bool]) MeshElementGroup[source]¶
- meshmode.mesh.processing.perform_flips(mesh: Mesh, flip_flags: onp.Array1D[bool], skip_tests: bool = False) Mesh[source]¶
- Parameters:
flip_flags – A
numpy.ndarraywithmeshmode.mesh.Mesh.nelementsentries indicating by their Boolean value whether the element is to be flipped.
- meshmode.mesh.processing.find_bounding_box(mesh: Mesh) tuple[onp.Array1D[floating[Any]], onp.Array1D[floating[Any]]][source]¶
- Returns:
a tuple (min, max), each consisting of a
numpy.ndarrayindicating the minimal and maximal extent of the geometry along each axis.
- meshmode.mesh.processing.merge_disjoint_meshes(meshes: Sequence[Mesh], *, skip_tests: bool = False, single_group: bool = False) Mesh[source]¶
- meshmode.mesh.processing.make_mesh_grid(mesh: Mesh, *, shape: tuple[int, ...], offset: tuple[onp.Array1D[floating[Any]], ...] | None = None, skip_tests: bool = False) Mesh[source]¶
Constructs a grid of copies of mesh, with shape copies in each dimensions at the given offset.
- Returns:
a merged mesh representing the grid.
- meshmode.mesh.processing.split_mesh_groups(mesh: Mesh, element_flags: onp.Array1D[np.integer[Any]], return_subgroup_mapping: bool = False) Mesh | tuple[Mesh, dict[tuple[int, int], int]][source]¶
Split all the groups in mesh according to the values of element_flags. The element flags are expected to be integers defining, for each group, how the elements are to be split into subgroups. For example, a single-group mesh with flags:
element_flags = [0, 0, 0, 42, 42, 42, 0, 0, 0, 41, 41, 41]
will create three subgroups. The integer flags need not be increasing or contiguous and can repeat across different groups (i.e. they are group-local).
- Parameters:
element_flags – a
numpy.ndarraywithnelementsentries indicating how the elements in a group are to be split.- Returns:
a
Meshwhere each group has been split according to flags in element_flags. If return_subgroup_mapping is True, it also returns a mapping of(group_index, subgroup) -> new_group_index.
- meshmode.mesh.processing.glue_mesh_boundaries(mesh: Mesh, bdry_pair_mappings_and_tols: Sequence[tuple[BoundaryPairMapping, float]], *, use_tree: bool | None = None) Mesh[source]¶
Create a new mesh from mesh in which one or more pairs of boundaries are “glued” together such that the boundary surfaces become part of the interior of the mesh. This can be used to construct, e.g., periodic boundaries.
Corresponding boundaries’ vertices must map into each other via an affine transformation (though the vertex ordering need not be the same). Currently operates only on facial adjacency; any existing nodal adjacency in mesh is ignored/invalidated.
- Parameters:
bdry_pair_mappings_and_tols – a
listof tuples (mapping, tol), where mapping is aBoundaryPairMappinginstance that specifies a mapping between two boundaries in mesh that should be glued together, and tol is the allowed tolerance between the transformed vertex coordinates of the first boundary and the vertex coordinates of the second boundary when attempting to match the two. Pass at most one mapping for each unique (order-independent) pair of boundaries.
- meshmode.mesh.processing.map_mesh(mesh: Mesh, f: Callable[[onp.Array2D[floating[Any]]], onp.Array2D[floating[Any]]]) Mesh[source]¶
Apply the map f to the mesh. f needs to accept and return arrays of shape
(ambient_dim, npoints).
- meshmode.mesh.processing.affine_map(mesh: Mesh, A: generic | onp.Array2D[floating[Any]] | None = None, b: generic | onp.Array1D[floating[Any]] | None = None) Mesh[source]¶
Apply the affine map \(f(x) = A x + b\) to the geometry of mesh.
- meshmode.mesh.processing.rotate_mesh_around_axis(mesh: Mesh, *, theta: float, axis: onp.Array1D[floating[Any]] | None = None) Mesh[source]¶
Rotate the mesh by theta radians around the axis axis.
- Parameters:
axis – a (not necessarily unit) vector. By default, the rotation is performed around the \(z\) axis.
Mesh refinement¶
- class meshmode.mesh.refinement.Refiner(mesh: Mesh)[source]¶
An abstract refiner class for
meshmode.mesh.Mesh.
- class meshmode.mesh.refinement.RefinerWithoutAdjacency(mesh: Mesh)[source]¶
A refiner that may be applied to non-conforming
meshmode.mesh.Meshinstances. It does not generate adjacency information.Note
If the input meshes to this refiner are not conforming, then the resulting meshes may contain duplicated vertices. (I.e. two different numbers referring to the same geometric vertex.)
Mesh visualization¶
- meshmode.mesh.visualization.draw_2d_mesh(mesh: Mesh, *, rng: Generator | None = None, draw_vertex_numbers: bool = True, draw_element_numbers: bool = True, draw_nodal_adjacency: bool = False, draw_face_numbers: bool = False, set_bounding_box: bool = False, **kwargs: Any) None[source]¶
Draw the mesh and its connectivity using
matplotlib.- Parameters:
set_bounding_box – if True, the plot limits are set to the mesh bounding box. This can help if some of the actors are not visible.
kwargs – additional arguments passed to
PathPatchwhen drawing the mesh group elements.
- meshmode.mesh.visualization.draw_curve(mesh: Mesh, *, el_bdry_style: str = 'o', el_bdry_kwargs: dict[str, Any] | None = None, node_style: str = 'x-', node_kwargs: dict[str, Any] | None = None) None[source]¶
Draw a curve mesh.
- Parameters:
el_bdry_kwargs – passed to
plotwhen drawing elements.node_kwargs – passed to
plotwhen drawing group nodes.
- meshmode.mesh.visualization.write_vertex_vtk_file(mesh: Mesh, file_name: str, *, compressor: str | None = None, overwrite: bool = False) None[source]¶
- meshmode.mesh.visualization.vtk_visualize_mesh(actx: ArrayContext, mesh: Mesh, filename: str, *, vtk_high_order: bool = True, overwrite: bool = False) None[source]¶