Tree Data Structures¶
Supported tree kinds¶
The following tree kinds are supported:
Nonadaptive trees have all leaves on the same (last) level.
Adaptive trees differ from nonadaptive trees in that they may have leaves on more than one level. Adaptive trees have the option of being level-restricted: in a level-restricted tree, neighboring leaves differ by at most one level.
All trees returned by the tree builder are pruned so that empty leaves have been removed. If a level-restricted tree is requested, the tree gets constructed in such a way that the version of the tree before pruning is also level-restricted.
Tree data structure¶
- class boxtree.box_flags_enum[source]¶
Constants for box flags bit field.
Flags for particle-based trees
- dtype¶
- IS_SOURCE_BOX¶
- IS_TARGET_BOX¶
- IS_SOURCE_OR_TARGET_BOX¶
- HAS_SOURCE_CHILD_BOXES¶
- HAS_TARGET_CHILD_BOXES¶
- HAS_SOURCE_OR_TARGET_CHILD_BOXES¶
- IS_LEAF_BOX¶
Warning
IS_LEAF_BOXis only used forTreeOfBoxesfor the moment.
- class boxtree.TreeOfBoxes(root_extent: Array, box_centers: Array, box_parent_ids: Array, box_child_ids: Array, box_levels: Array, box_flags: Array | None, level_start_box_nrs: Array | None, box_id_dtype: dtype[integer[Any]], box_level_dtype: dtype[integer[Any]], coord_dtype: dtype[floating[Any]], sources_have_extent: bool, targets_have_extent: bool, extent_norm: Literal['l2', 'linf'], stick_out_factor: float, _is_pruned: bool)[source]¶
A quad/octree tree of pure boxes, excluding their contents (e.g. particles). It is a lightweight tree handled with
numpy, intended for mesh adaptivity. One may generate ameshmode.mesh.Meshobject consisting of leaf boxes usingmake_meshmode_mesh_from_leaves().- dimensions¶
- nlevels¶
- nboxes¶
- root_extent¶
(Scalar) extent of the root box.
- box_centers¶
mod:numpy array of shape
(dim, nboxes)of the centers of the boxes.
- bounding_box¶
A
tuple(bbox_min, bbox_max)ofnumpyvectors giving the (built) extent of the tree. Note that this may be slightly larger than what is required to contain all particles, if any.
- box_flags¶
box_flags_enum.dtype[nboxes]A bitwise combination of
box_flags_enumconstants.
- level_start_box_nrs¶
box_id_t [nlevels+1]An array of box ids indicating the ID at which each level starts. Levels are contiguous in box ID space. To determine how many boxes there are in each level, access the start of the next level. This array is built so that this works even for the last level.
- box_id_dtype¶
- box_level_dtype¶
- leaf_boxes¶
Array of leaf boxes.
- sources_have_extent¶
- targets_have_extent¶
- extent_norm¶
- __init__(root_extent: Array, box_centers: Array, box_parent_ids: Array, box_child_ids: Array, box_levels: Array, box_flags: Array | None, level_start_box_nrs: Array | None, box_id_dtype: dtype[integer[Any]], box_level_dtype: dtype[integer[Any]], coord_dtype: dtype[floating[Any]], sources_have_extent: bool, targets_have_extent: bool, extent_norm: Literal['l2', 'linf'], stick_out_factor: float, _is_pruned: bool) None¶
- class boxtree.Tree(root_extent: Array, box_centers: Array, box_parent_ids: Array, box_child_ids: Array, box_levels: Array, box_flags: Array | None, level_start_box_nrs: Array | None, box_id_dtype: dtype[integer[Any]], box_level_dtype: dtype[integer[Any]], coord_dtype: dtype[floating[Any]], sources_have_extent: bool, targets_have_extent: bool, extent_norm: Literal['l2', 'linf'], stick_out_factor: float, _is_pruned: bool, sources_are_targets: bool, particle_id_dtype: dtype[integer[Any]], sources: Array, source_radii: Array, targets: Array, target_radii: Array, bounding_box: tuple[Array, Array], user_source_ids: Array, sorted_target_ids: Array, box_source_starts: Array, box_source_counts_nonchild: Array, box_source_counts_cumul: Array, box_target_starts: Array, box_target_counts_nonchild: Array, box_target_counts_cumul: Array, box_source_bounding_box_min: Array, box_source_bounding_box_max: Array, box_target_bounding_box_min: Array, box_target_bounding_box_max: Array)[source]¶
A quad/octree consisting of particles sorted into a hierarchy of boxes.
Optionally, particles may be designated ‘sources’ and ‘targets’. They may also be assigned radii which restrict the minimum size of the box into which they may be sorted.
Instances of this class are not constructed directly. They are returned by
TreeBuilder.__call__().Inherits from
TreeOfBoxes.Flags
- sources_are_targets¶
boolWhether sources and targets are the same
- sources_have_extent¶
boolWhether this tree has sources in non-leaf boxes
- targets_have_extent¶
boolWhether this tree has targets in non-leaf boxes
Data types
- particle_id_dtype¶
- box_id_dtype¶
- coord_dtype¶
- box_level_dtype¶
Counts and sizes
- stick_out_factor¶
A scalar used for calculating how much particles with extent may overextend their containing box.
Each box in the tree can be thought of as being surrounded by a fictitious box whose \(l^\infty\) radius is 1 + stick_out_factor larger. Particles with extent are allowed to extend inside (a) the fictitious box or (b) a disk surrounding the fictitious box, depending on
extent_norm.
- extent_norm¶
One of
None,"l2"or"linf". If None, particles do not have extent. If not None, indicates the norm with which extent-bearing particles are determined to lie ‘inside’ a box, taking into account the box’sstick_out_factor.This image illustrates the difference in semantics:
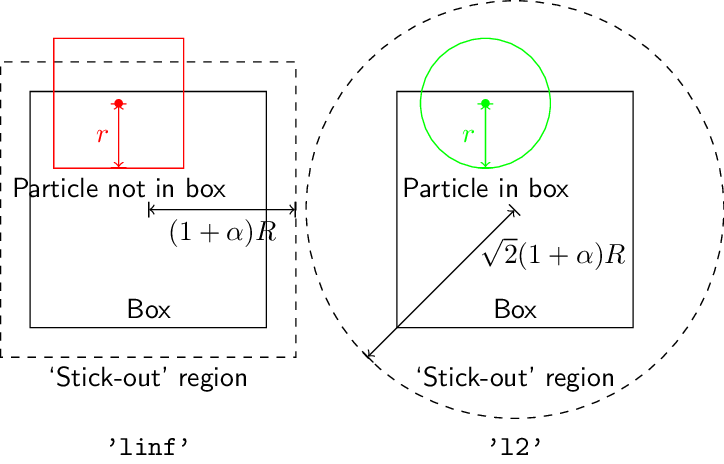
In the figure, the box has (\(\ell^\infty\)) radius \(R\), the particle has radius \(r\), and
stick_out_factoris denoted \(\alpha\).
- nlevels¶
- nboxes¶
- nsources¶
- ntargets¶
- level_start_box_nrs¶
box_id_t [nlevels+1]An array of box ids indicating the ID at which each level starts. Levels are contiguous in box ID space. To determine how many boxes there are in each level, access the start of the next level. This array is built so that this works even for the last level.
Per-particle arrays
- sources¶
coord_t [dimensions][nsources](an object array of coordinate arrays)Stored in tree source order. May be the same array as
targets.
- source_radii¶
coord_t [nsources]\(l^\infty\) radii of thesources.Available if
sources_have_extentis True.
- targets¶
coord_t [dimensions][ntargets](an object array of coordinate arrays)Stored in tree target order. May be the same array as
sources.
- target_radii¶
coord_t [ntargets]\(l^\infty\) radii of the
targets. Available iftargets_have_extentis True.
Tree/user order indices
See Particle Orderings.
- user_source_ids¶
particle_id_t [nsources]Fetching from these indices will reorder the sources from user source order into tree source order.
- sorted_target_ids¶
particle_id_t [ntargets]Fetching from these indices will reorder the targets from tree target order into user target order.
Box properties
- box_source_starts¶
particle_id_t [nboxes]List of sources in each box. Records start indices in
sourcesfor each box. Use together withbox_source_counts_nonchildorbox_source_counts_cumul. May be the same array asbox_target_starts.
- box_source_counts_nonchild¶
particle_id_t [nboxes]List of sources in each box. Records number of sources from
sourcesin each box (excluding those belonging to child boxes). Use together withbox_source_starts. May be the same array asbox_target_counts_nonchild.
- box_source_counts_cumul¶
particle_id_t [nboxes]List of sources in each box. Records number of sources from
sourcesin each box and its children. Use together withbox_source_starts. May be the same array asbox_target_counts_cumul.
- box_target_starts¶
particle_id_t [nboxes]List of targets in each box. Records start indices in
targetsfor each box. Use together withbox_target_counts_nonchildorbox_target_counts_cumul. May be the same array asbox_source_starts.
- box_target_counts_nonchild¶
particle_id_t [nboxes]List of targets in each box. Records number of targets from
targetsin each box (excluding those belonging to child boxes). Use together withbox_target_starts. May be the same array asbox_source_counts_nonchild.
- box_target_counts_cumul¶
particle_id_t [nboxes]List of targets in each box. Records number of targets from
targetsin each box and its children. Use together withbox_target_starts. May be the same array asbox_source_counts_cumul.
- box_parent_ids¶
box_id_t [nboxes]Box 0 (the root) has 0 as its parent.
- box_child_ids¶
box_id_t [2**dimensions, aligned_nboxes](C order, ‘structure of arrays’)“0” is used as a ‘no child’ marker, as the root box can never occur as any box’s child.
- box_centers¶
coord_t [dimensions, aligned_nboxes](C order, ‘structure of arrays’)
- box_levels¶
box_level_dtypebox_level_t [nboxes]
Particle-adaptive box extents
These attributes capture the maximum extent of particles (including the particle’s extents) inside of the box. If the box is empty, both min and max will reflect the box center. The purpose of this information is to reduce the cost of some interactions through knowledge that some boxes are partially empty. (See the from_sep_smaller_crit argument to the constructor of
boxtree.traversal.FMMTraversalBuilderfor an example.)Note
To obtain the overall, non-adaptive box extent, use
boxtree.Tree.box_centersalong withboxtree.Tree.box_levels.If they are not available, the corresponding attributes will be None.
- box_source_bounding_box_min¶
coordt_t [dimensions, aligned_nboxes]
- box_source_bounding_box_max¶
coordt_t [dimensions, aligned_nboxes]
- box_target_bounding_box_min¶
coordt_t [dimensions, aligned_nboxes]
- box_target_bounding_box_max¶
coordt_t [dimensions, aligned_nboxes]
Tree with linked point sources¶
- class boxtree.tree.TreeWithLinkedPointSources(root_extent: Array, box_centers: Array, box_parent_ids: Array, box_child_ids: Array, box_levels: Array, box_flags: Array | None, level_start_box_nrs: Array | None, box_id_dtype: dtype[integer[Any]], box_level_dtype: dtype[integer[Any]], coord_dtype: dtype[floating[Any]], sources_have_extent: bool, targets_have_extent: bool, extent_norm: Literal['l2', 'linf'], stick_out_factor: float, _is_pruned: bool, sources_are_targets: bool, particle_id_dtype: dtype[integer[Any]], sources: Array, source_radii: Array, targets: Array, target_radii: Array, bounding_box: tuple[Array, Array], user_source_ids: Array, sorted_target_ids: Array, box_source_starts: Array, box_source_counts_nonchild: Array, box_source_counts_cumul: Array, box_target_starts: Array, box_target_counts_nonchild: Array, box_target_counts_cumul: Array, box_source_bounding_box_min: Array, box_source_bounding_box_max: Array, box_target_bounding_box_min: Array, box_target_bounding_box_max: Array, npoint_sources: int, point_source_starts: Array, point_source_counts: Array, point_sources: Array, user_point_source_ids: Array, box_point_source_starts: Array, box_point_source_counts_nonchild: Array, box_point_source_counts_cumul: Array)[source]¶
In this
boxtree.Treesubclass, the sources of the original tree are expanded into point sources which are linked to the extent-having sources in the original tree.In an FMM context, they may stand in for the ‘underlying’ source for the purpose of the far-field calculation. It has all the same attributes as
boxtree.Tree.boxtree.Tree.sources_have_extentis always True for instances of this type. In addition, the following attributes are available.- npoint_sources¶
- point_source_starts¶
particle_id_t [nsources]The array
point_sources[:][point_source_starts[isrc]: point_source_starts[isrc]+point_source_counts[isrc]]contains the locations of point sources corresponding to the ‘original’ source with index isrc. (Note that this expression will not entirely work becausepoint_sourcesis an object array.)This array is stored in tree point source order, unlike the parameter to
boxtree.tree.TreeWithLinkedPointSources.__init__()
- point_source_counts¶
particle_id_t [nsources](Seepoint_source_starts.)
- point_sources¶
coord_t [dimensions][npoint_sources](an object array of coordinate arrays)Stored in tree point source order.
- user_point_source_ids¶
particle_id_t [nsources]Fetching from these indices will reorder the sources from user point source order into tree point source order.
- box_point_source_starts¶
particle_id_t [nboxes]
- box_point_source_counts_nonchild¶
particle_id_t [nboxes]
- box_point_source_counts_cumul¶
particle_id_t [nboxes]
- __init__()¶
This constructor is not intended to be called by users directly. Call
link_point_sources()instead.
- boxtree.tree.link_point_sources(actx: ArrayContext, tree: Tree, point_source_starts: Array, point_sources: Array, *, debug: bool = False) TreeWithLinkedPointSources[source]¶
Construction: Requires that
boxtree.Tree.sources_have_extentis True on tree.- Parameters:
point_source_starts –
point_source_starts[isrc]andpoint_source_starts[isrc+1]together indicate a ranges of point particle indices in point_sources which will be linked to the original (extent-having) source number isrc. isrc is in user source order.All the particles linked to isrc should fall within the \(l^\infty\) ‘circle’ around particle number isrc with the radius drawn from
boxtree.Tree.source_radii.point_sources – an object array of (XYZ) point coordinate arrays.
Filtering the lists of targets¶
Data structures¶
- class boxtree.tree.FilteredTargetListsInUserOrder(nfiltered_targets: int, target_starts: Array, target_lists: Array)[source]¶
Use
ParticleListFilter.filter_target_lists_in_user_order()to create instances of this class.This class represents subsets of the list of targets in each box (as given by
boxtree.Tree.box_target_startsandboxtree.Tree.box_target_counts_cumul). This subset is specified by an array of flags in user target order.The list consists of target numbers in user target order. See also
FilteredTargetListsInTreeOrder.- nfiltered_targets¶
- target_starts¶
particle_id_t [nboxes+1]Filtered list of targets in each box. Records start indices in
boxtree.Tree.targetsfor each box. Use together withtarget_lists. The lists for each box are contiguous, so thattarget_starts[ibox+1]records the end of the target list for ibox.
- target_lists¶
particle_id_t [nboxes]Filtered list of targets in each box. Records number of targets from
boxtree.Tree.targetsin each box (excluding those belonging to child boxes). Use together withtarget_starts.Target numbers are stored in user order, as the class name suggests.
- class boxtree.tree.FilteredTargetListsInTreeOrder(nfiltered_targets: int, box_target_starts: Array, box_target_counts_nonchild: Array, targets: Array, unfiltered_from_filtered_target_indices: Array)[source]¶
Use
ParticleListFilter.filter_target_lists_in_tree_order()to create instances of this class.This class represents subsets of the list of targets in each box (as given by
boxtree.Tree.box_target_startsandboxtree.Tree.box_target_counts_cumul).This subset is specified by an array of flags in user target order.Unlike
FilteredTargetListsInUserOrder, this does not create a CSR-like list of targets, but instead creates a new numbering of targets that only counts the filtered targets. This allows all targets in a box to be placed consecutively, which is intended to help traversal performance.- nfiltered_targets¶
- box_target_starts¶
particle_id_t [nboxes]Filtered list of targets in each box, like
boxtree.Tree.box_target_starts. Records start indices intargetsfor each box. Use together withbox_target_counts_nonchild.
- box_target_counts_nonchild¶
particle_id_t [nboxes]Filtered list of targets in each box, like
boxtree.Tree.box_target_counts_nonchild. Records number of sources fromtargetsin each box (excluding those belonging to child boxes). Use together withbox_target_starts.
- targets¶
coord_t [dimensions][nfiltered_targets](an object array of coordinate arrays)
- unfiltered_from_filtered_target_indices¶
Storing to these indices will reorder the targets from filtered tree target order into ‘regular’ tree target order.
Tools¶
- class boxtree.tree.ParticleListFilter(array_context: ArrayContext)[source]¶
- filter_target_lists_in_tree_order(actx: ArrayContext, tree: Tree, flags: Array) FilteredTargetListsInTreeOrder[source]¶
- Parameters:
flags – an array of length
boxtree.Tree.ntargetsofnumpy.int8objects, which indicate by being zero that the corresponding target (in user target order) is not part of the filtered list, or by being nonzero that it is.
- filter_target_lists_in_user_order(actx: ArrayContext, tree: Tree, flags: Array) FilteredTargetListsInUserOrder[source]¶
- Parameters:
flags – an array of length
boxtree.Tree.ntargetsofnumpy.int8objects, which indicate by being zero that the corresponding target (in user target order) is not part of the filtered list, or by being nonzero that it is.